







新闻中心
【科技成果推介】仿生自主潜航器
- Categories:最新动态
- Author:
- Origin:
- Time of issue:2020-09-11
- Views:0
(Summary description)
【科技成果推介】仿生自主潜航器
(Summary description)
- Categories:最新动态
- Author:
- Origin:
- Time of issue:2020-09-11
- Views:0
目前人类正面临着人口、资源和环境三大难题。随着各国经济的飞速发展和世界人口的不断增多,人类消耗的自然资源越来越多,陆地上的资源正在日益减少,而占地球表面积的71%的海洋和海洋底部却蕴藏着极其丰富的生物资源及矿产资源。
小编今天为大家介绍的这款科技成果便是应用于水下环境,TA就是由我院海洋信息与智能装备研究所研发的仿生自主潜航器。接下来就请一起跟随小编来了解下吧~

【科技研发】
海洋作为人类尚未开发完全的宝地和高技术领域之一,已经成为各国的重要战略目标,是近几年国际上激烈竞争的焦点之一,有很多国家都在进行海洋资源开发,许多发达国家更是把海洋开发列为国家的长远计划。
我国拥有300万平方公里的蓝色国土,约为我国陆地国土面积的三分之一,在这辽阔的海域内蕴藏的极其丰富的资源。认识海洋、开发海洋需要各种高技术手段支持,相关领域的科技研发是建设海洋强国、捍卫国家安全和实现可持续发展伟大目标所必不可少的。水下机器人技术作为探索海洋空间的最重要手段之一,与探索外空间的运载火箭技术有同等重要的意义。因此,水下机器人的发展一直为世界各国所关注,其中自主式水下潜航器( Autonomous Underwater Vehicle,简称 AUV)应用最为广泛。
为了适应未来水下航行器技术发展的要求,人们在开发具有大范围转移能力和高机动性的新型水下航行器的同时,也正在为传统水下航行器寻找更优良的推进和操纵系统。另一方面,水生动物经过上亿年的演变和进化,早已在优胜劣汰中将其在水中的运动能力发挥到了极至。其中鱼类和鲸类等哺乳动物的游动方式具有高速、灵活、低噪等特点,其游动和控制姿态的能力是任何日前装备传统的操纵与推进系统的水下航行器所无法比拟的。
【科技创新】
水下仿生技术日益得到人们的重视并已成为水下航行器的重要研究方向之一。它基于仿生学原理,通过对鱼类游动机理的研究,利用机械结构、电子设备和功能材料来开发模仿鱼类的操纵和推进方式,并将其应用于水下航行器。与传统螺旋桨推进器相比,将仿鱼鳍推进器应用于水下航行器,成为新型的仿生水下航行器,将具有如下特点:
01高机动性
当航速较高时,采用传统螺旋桨的水下航行器回转半径较大,航速也会降低。采用仿鱼鳍推进器则可以较好的克服这些缺点,增加水下航行器启动、加速和转向的能力,提高机动性。
02更优化的流体性能
鱼类尾鳍摆动产生的尾流具有推进作用,可对仿鱼鳍推进器的尾涡进行控制,使其具有更加完善的流体力学性能。同时,研究表明鱼类通过游动可以有效地减小其阻力,水下航行器也可以利用这一点降低能耗。
03噪声低、环保、隐身能力强
仿鱼鳍推进器运行时的噪声比螺旋桨推进器运行时的噪声低的多,不易被对方声纳发现和识别,对于海洋生物没有噪音危害,能融入海洋生物种群中;且鱼类的游动充分利用并控制了尾涡,有利于隐身和突防,具有重要的军事价值。
04推进系统与操纵系统统一
传统水下航行器用螺旋桨作为推进系统,用舵或者侧推桨作为操纵系统,结构庞大、机构复杂。仿鱼鳍推进器的采用,使“舵—桨”功能合二为一,精简了机构,增大了水下航行器的有效容积和负载能力,具有重大的现实意义和实用价值。
05推进效率高、节能
船用螺旋桨的流体推进效率不超过40%,而鱼类游动的相应效率可达80% 以上, 鱼类游动的高机动性和稳定性以及低噪声等先进指标更使潜艇望尘莫及。
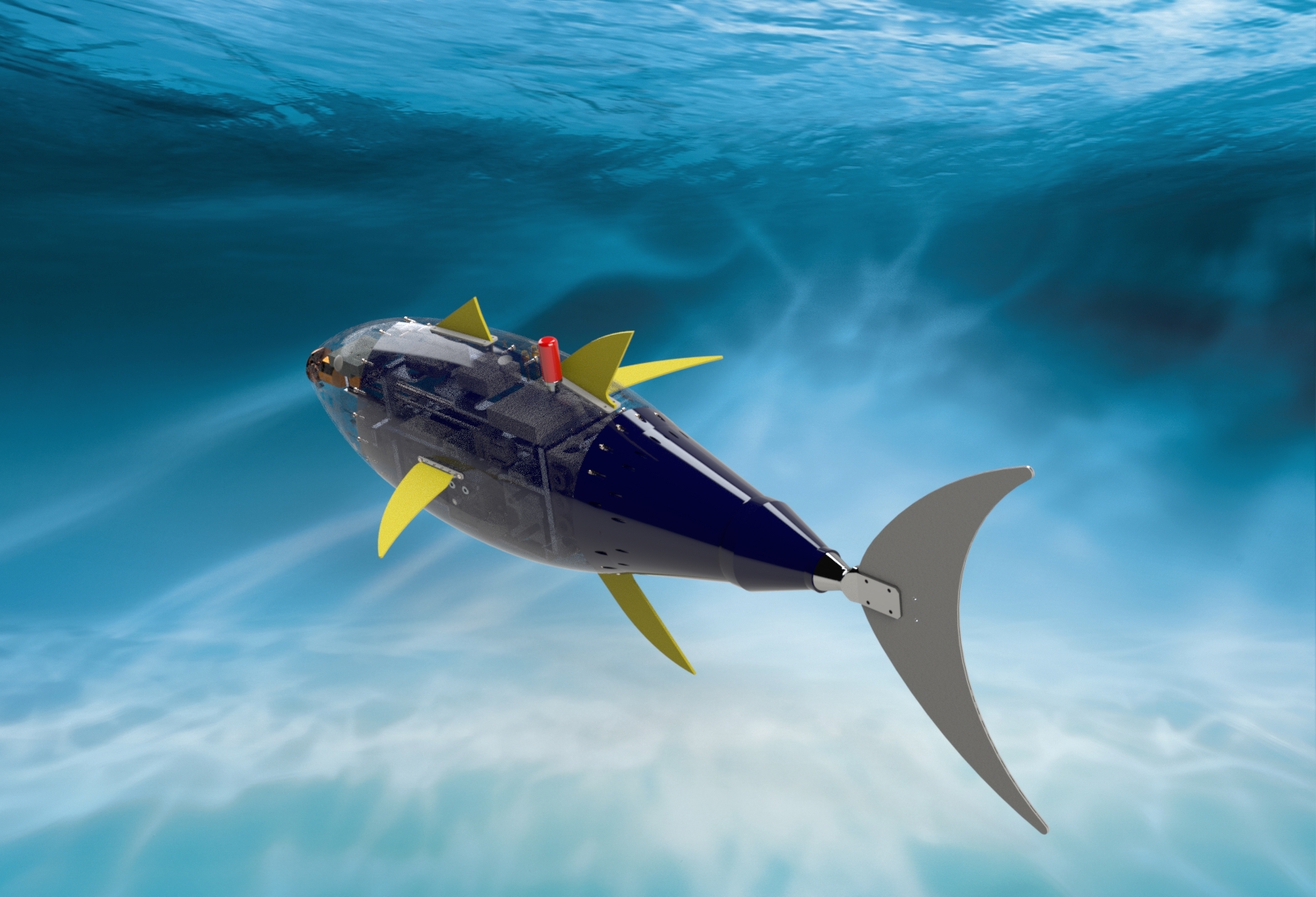
仿生自主潜航器效果图
我院海洋信息与智能装备研究所研发的仿生自主潜航器模仿蓝鳍金枪鱼操纵和推进方式,具有高速、高效、长续航、低阻、低噪、低维护及结构简洁等特点,适用于各类水下目标探测及环境监测,可根据用户需求搭载不同负载,提供更宽阔的载荷空间。侧身平面结构尤其适合搭载面阵水听器,指向性更好,结合现设计的一千米潜深结构更适合特殊应用以及对生态影响要求较高的场合。
技术特点
1.速度分档指标:3-6节,6-12节,12-24节。
2.仿生摆尾式驱动:噪音低、隐蔽性好、推进效率高(最高可达80%)。
3.蓝鳍金枪鱼外形:阻尼系数低。
4.摆动式电机:简化传动结构,提高传动效率及机械寿命。
5.高清鱼眼双目摄像:摄像范围270度,1080P分辨率。
6.声纳探测、光纤面阵应用:主动探测与被动探测相结合,探测灵敏、范围宽。
7.智能型自适应尾鳍:根据任务需要,调整尾鳍刚度使推进效率最佳。
8.多重定位方式、多AUV协作定位:惯性导航、北斗、GPS等。
9.群体智能:信息共享,智能躲避,快速集结,提高目标判别率。
10.窄波束水声通信
11.水下充电:可快充,充电时信息资料快速上传。


仿生自主潜航器样机
当前样机技术指标:体长2.6米,重量255千克,潜深100米,速度6节,有效载荷30千克。
【应用价值】

仿生自主潜航器测试
民用领域可应用场景
■ 渔业养殖:水产养殖监测(温、盐、溶解氧、PH值、饲料),鱼群探测;
■ 勘探开发:石油、矿产、天然气、可燃冰等海底矿藏资源;
■ 抢险救援:救捞作业、水下救援,水鬼蛙人驱离;
■ 科考研究:海洋生物、海床海山、水文地质;
■ 水下检修:船体检修,大坝巡检,海底管道、光电缆的敷设与监测;
■ 娱乐服务:观光旅游、水下摄影、潜水救助。
军用领域可应用场景
■ 训练演习:靶艇;
■ 执行任务:独立侦察、潜艇伴航与前出扫海;
■ 目标探测:战略威慑目标;
■ 水下通信:与母艇、浮标、舰船、其它AUV之间通信;
■ 应急救援:远海防卫;
■ 环境监测:侦察保障;
■ 海洋工程:水下隐蔽施工,前出埋伏;
■ 军事运输:水下隐蔽运输。
海洋信息与智能装备研究所
海洋信息与智能装备研究所是以清华大学信息科学与技术国家实验室为依托,以电子工程系任勇教授团队为核心队伍建立起来的研究机构,隶属于清华大学天津高端装备研究院。研究方向以自主式水下潜航器( Autonomous Underwater Vehicle,简称 AUV) 和多个 AUV形成的水下蜂群为主,包括水下机器人的运动学机理研究、深海环境下的信息交换与处理、深海环境下定位与协同、深海 AUV装备的研发制造技术、机器学习理论及其应用技术、复杂生产制造过程的建模与优化调度技术等。团队以仿生AUV为开发重点,不止步于科研,以实现产业化为目标,以智能科技服务国民为宗旨,将仿生AUV产品不断推向应用,依托市场需求并同时进行供给侧改革创新的需求刺激,为撬动中国海洋经济,实现海洋强国伟大目标贡献一份力量。
技术对接、业务洽谈
联络人:肖志东
电话:17701282622
邮箱:17701282622@163.com
来源|海洋信息与智能装备研究所
编辑|张澍
以上相关技术最终解释权归海洋信息与智能装备研究所所有
Scan the QR code to read on your phone
微信公众号

版权所有
Copyright © 2016. TIANJIN RESEARCH INSTITUTE FOR ADVANCED EQUIPMENT All rights reserved.
津公网安备 12011002022002号 津ICP备17005411号-1 网站建设:中企动力 天津 
首页友情链接
